Summary - I designed new electronics to accompany the new robot that was being built. Our old robot electronics enclosures were bulky, expensive and difficult to troubleshoot, so the new design cut down costs, increased portability and manufacturability, and improved debugging capabilities.
MAHI Open Exo PCB Design
In addition to designing new hardware, I designed a PCB for the robot to replace the giant and expensive electronics box that powered our previous robot (the MEII). The PCB design was done using Autodesk Fusion 360.
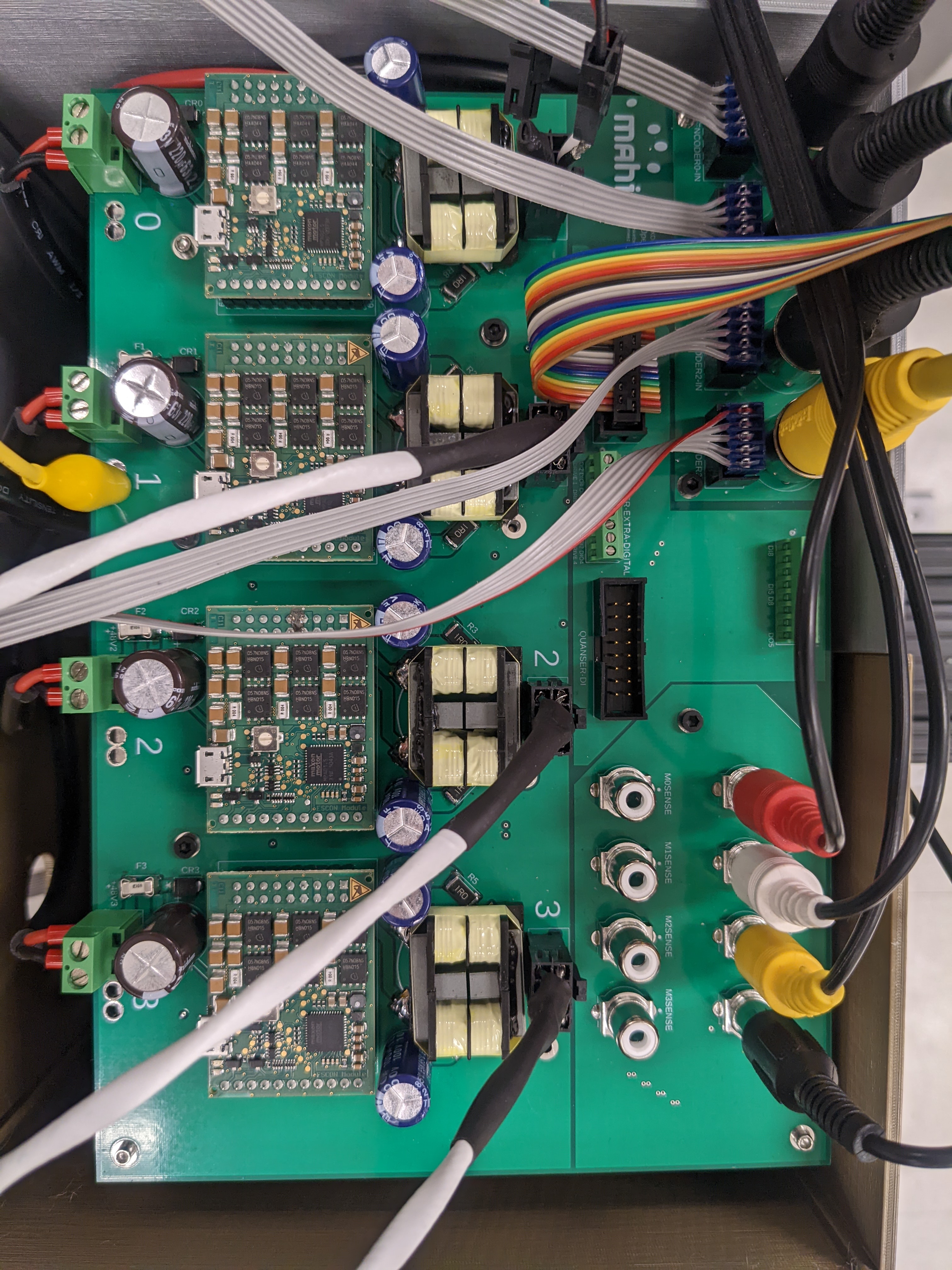
The main brains of the PCB are four Maxon Escon 50/5 motor motor drivers to power the four maxon motors on the Mahi Open Exo. The design has two separate areas on the board, one side that has components that connect to the robot - encoder and motor connections - and the other that has components that connect to the daq -encoder, analog input, digital inputs and outputs.
We are currently designing an enclosure so that the power supply can sit underneath the PCB, and to have a dedicated 120V wall input and switch for the system with emergency stop. There will also be a cooling duct so that there is sufficient airflow for the electronics.