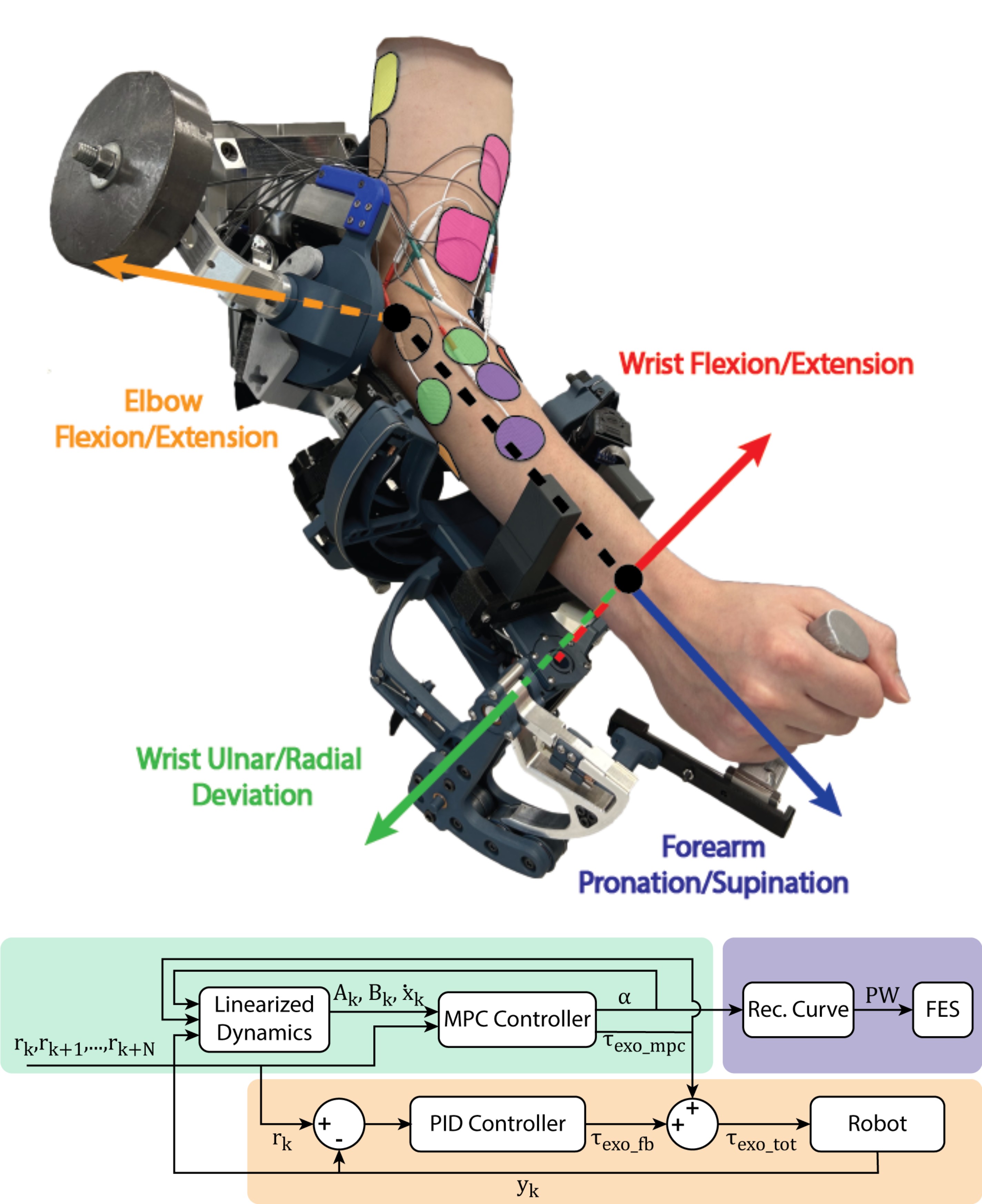
Model Predictive Control for Multi-DOF Functional Electrical Stimulation & Exoskeleton Integration
This project focused on drawing from the strengths of Functional Electrical Stimulation (FES) and Rehabilitation Exoskeletons to eliminate the inherent weaknesses from both. A model predictive control scheme was implemented to distribute the assistance, and human studies showed that the control scheme was helpful for multi-DOF movements.
Papers
Nathan Dunkelberger, Skye A. Carlson, Jeffrey Berning, Eric M. Schearer, Marcia K. O’Malley. Multi Degree of Freedom Hybrid FES and Robotic Control of the Upper Limb. FES_EXO_Multi_DOF 2024. IEEE Transactions on Neural Systems and Rehabilitation Engineering.
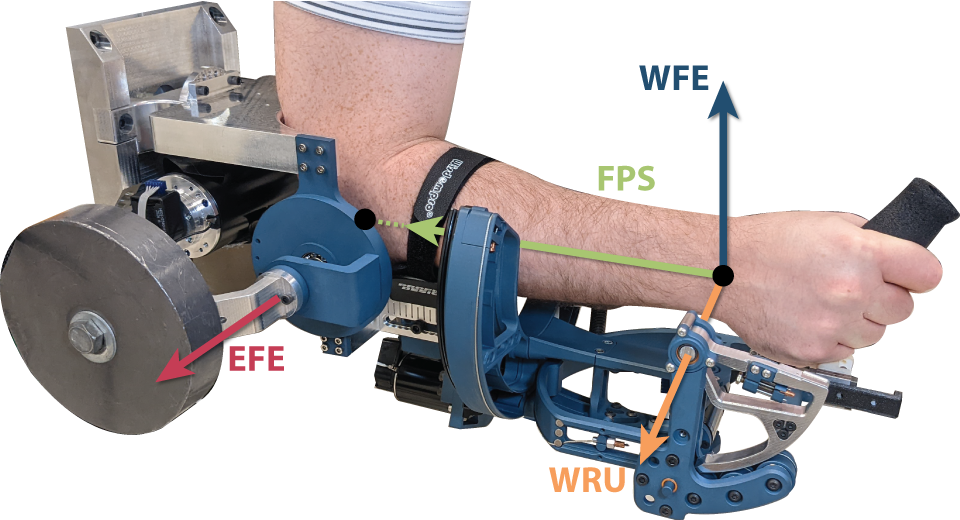
MAHI Open Exoskeleton Design
With the goal of developing my combined FES and Exoskeleton robot, I developed the MAHI Open Exoskeleton to that end. This included mechanical, electrical, and software design, characterization of the dynamics and the creation of a dynamic simulation environment to test advanced control schemes without needing hardware.
Papers
Nathan Dunkelberger, Jeffrey Berning, Kevin J. Dix, Samuel A. Ramirez, and Marcia K. O'Malley. Design, Characterization, and Dynamic Simulation of the MAHI Open Exoskeleton Upper Limb Robot. MOE_TMECH 2022. IEEE/ASME TRANSACTIONS ON MECHATRONICS.
Language through Haptics
Using the MISSIVE (shown), I created a protocol to teach people to understand the English language through haptics in 100 minutes of training. Participants learned 23 phonemes (unique sounds in the English language) and how to build them into words. In a final 50 word test, subjects correctly identified 86% of the words presented to them haptically.
Papers
N. Dunkelberger, Sullivan, J., Bradley, J., Walling, N. P., Manickam, I., Dasarathy, G., Israr, A., Lau, F. W. Y., Klumb, K., Knott, B., Abnousi, F., Baraniuk, R., and O'Malley, M. K.. Conveying Language Through Haptics, A Multi-sensory Approach. ISWC 2018. Singapore, Singapore.